




")
Le gyroscope est utilisé dans l’aéronautique et l’aérospatial pour le contrôle de position ou en tant qu’instrument de navigation pour ce que l’on appelle la navigation par inertie. Le gyroscope mécanique est constitué principalement d’une masse en rotation rapide. Un gyroscope libre s’efforce de maintenir la position de son axe de rotation dans l’espace, indépendamment de la force de gravité. Cette propriété est utilisée par exemple pour l’horizon virtuel dans un avion. Lorsque le rotor repose dans un châssis, on parle de gyroscope guidé. Lorsqu’une force perpendiculaire à son axe de rotation est appliquée sur un gyroscope guidé, alors le gyroscope guidé exerce un moment cinétique: le moment gyroscopique. La rotation perpendiculaire à l’axe de rotation est appelée précession. Un gyroscope a donc trois axes perpendiculaires entre eux: l’axe de rotation, l’axe de précession et l’axe d’action, qui exerce le moment gyroscopique.
Le TM 630 permet de se familiariser avec le mode de fonctionnement d’un gyroscope. Les moments générés par la précession peuvent être déterminés dans le cadre d’essais.
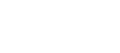
Le gyroscope est constitué d’une masse d’inertie entraînée par un moteur électrique à une vitesse de rotation élevée. Le rotor repose dans un châssis à cardan. Il est possible de faire tourner le châssis autour de l’axe vertical en utilisant un second moteur électrique. Ce qui permet de générer la précession. Par la précession, le gyroscope exerce un moment, le moment gyroscopique, autour de l’axe horizontal. Le moment gyroscopique a pour effet de dévier le châssis interne.
En utilisant un levier et un poids mobile, on peut déterminer le moment gyroscopique. Les vitesses de rotation des deux moteurs électriques pour la rotation et la précession sont ajustables et sont affichées numériquement.
Un capot protecteur transparent garantit la sécurité: le fonctionnement n’est possible que lorsque celui-ci est correctement positionné.






")